剛体連結の右側の  をクリック : 剛体連結テーブル表示
をクリック : 剛体連結テーブル表示
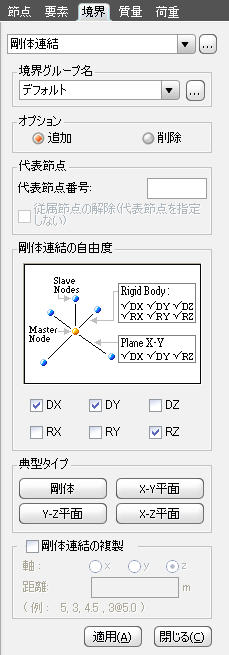
 境界グループ名 境界グループ名
入力した境界条件を含む境界グループを選択します。グループ指定が不必要な場合は
"デフォルト"を選択します。
境界グループを追加生成または修正するためには
ボタンを
クリックして"境界グループの定義"ダイアログを呼び出します。
オプション
追加/変更 : 任意の節点を従属節点で新規指定または、既存の従属関係を変更する場合
削除 : 任意の節点の従属関係を解除する場合
代表節点番号
代表節点を入力します。代表節点はキーボードで直接入力したり、入力欄を一度クリック
した後、マウスカーソルで該当節点を指定して入力します。従属節点は選択機能を選択して
指定します。
従属節点の解除(代表節点を指定しない)
:
代表節点を設定せずに選択した節点の従属関係を解除します。
この機能は削除オプションの時に限って使用可能です。
剛体連結の自由度
代表節点に属する自由度成分を指定します。
DX : 全体座標系X方向の変位自由度
DY : 全体座標系Y方向の変位自由度
DZ : 全体座標系Z方向の変位自由度
RX : 全体座標系 Xに対する回転自由度
RY : 全体座標系 Yに対する回転自由度
RZ : 全体座標系 Zに対する回転自由度
剛体連結の複製
代表節点と従属節点で指定する節点が、ユーザー座標系(全体座標系)の任意の軸方向に
等間隔(任意間隔)、連続的に配置されている時、同一な自由度に対して代表節点と従属
節点の剛体連結条件を複写します。
軸 : 剛体連結条件を複写する軸方向
距離 : 剛体連結条件の複写距離
Note
剛体連結条件を複写する位置には、代表節点と従属節点になる節点が入力されてる必要があります。
典型タイプ
以下の場合に該当する時は、簡単に該当ボタンをクリックすることで、
上記の自由度の指定過程を行うことができます。
 : 全方向剛体連結(Rigid
Body Connection) : 全方向剛体連結(Rigid
Body Connection)
 :全体座標系X-Y平面に対する剛体連結(Rigid
Plane Connection) :全体座標系X-Y平面に対する剛体連結(Rigid
Plane Connection)
 : 全体座標系
Y-Z 平面に対する剛体連結 (Rigid Plane Connection) : 全体座標系
Y-Z 平面に対する剛体連結 (Rigid Plane Connection)
 : 全体座標系
X-Z 平面に対する剛体連結 (Rigid Plane Connection) : 全体座標系
X-Z 平面に対する剛体連結 (Rigid Plane Connection)
|