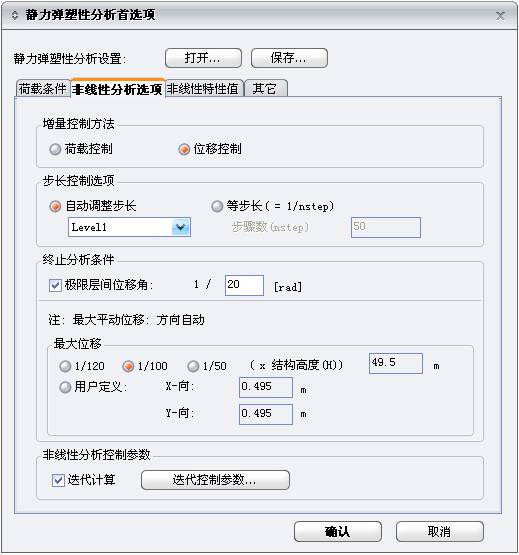
(1)增量控制方法:
提供荷载控制和位移控制两种方法。
(2)步长控制选项:
定义步长调整方法,提供自动调整步长法和等步长法。
① 自动调整步长:提供三个等级(Level1、Level2、Level3),分别对应的最大总步骤数为50、100、200。程序按照总步骤数分割控制荷载或控制位移,并将其作为最小步长。程序首先会按较大步长
计算一次,没有收敛时会自动减小步长计算,减小到的最小步长为各等级对应的最小步长(用各等级步骤数分割的步长)。当减少到最小步长仍然没有收敛,程序会按最小步长计算下一步骤。
等级越高分析精度越高也越容易收敛,但分析时间也越长。一般结构选择Level1就能满足收敛要求。
② 等步长(=1/nstep):控制位移或荷载按总步骤数分割后等间距增加进行分析。
③ 步骤数(nstep):采用等步长法时需要定义总步骤数。nstep应输入不小于1的正整数,推荐输入20以上的数。
(3)终止分析条件:
达到总步骤数、极限层间位移角、最大位移控制条件,满足其中一个条件程序都会终止分析。
① 极限层间位移角:因为《抗规》GB50011-2001第5.5.5中规定的弹塑性层间位移角限值范围大致在1/30~1/120,为了获得较多结果数据将默认值设为1/20。建议输入比规范最大弹塑性层间位移角限值大的数值。当分析过程中层间位移角超过输入值时自动停止计算;
② 最大平动位移方向:在首选项中默认为方向自动,表示在X、Y方向的位移中取大值作为控制条件,位移控制法中默认勾选"最大平动位移:方向自动"且不能修改;
③最大位移:只有勾选上面的"最大水平位移方向"时才被激活。位移控制法中默认勾选"最大水平位移方向"且不能修改。最大位移控制条件中给出了相对于结构总高度的几个位移控制条件,有1/120、1/100、1/50,基本上对应结构从弹性到弹塑性的几种状态。另外,用户也可以直接输入X、Y两个方向的位移控制值。当位移值输入负值方向时将按反方向加载。
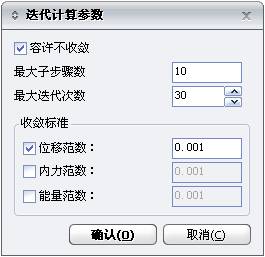
(4)非线性分析控制参数
非线性分析不仅要将控制荷载或控制位移进行分割,在各步骤内为了满足收敛条件也需要进行迭代计算。