| [菜单路径] 静力弹塑性分析>静力弹塑性荷载>荷载工况 | |||||||||||||||||||||||||||
 | |||||||||||||||||||||||||||
| |||||||||||||||||||||||||||
|
功能说明 | |||||||||||||||||||||||||||
|
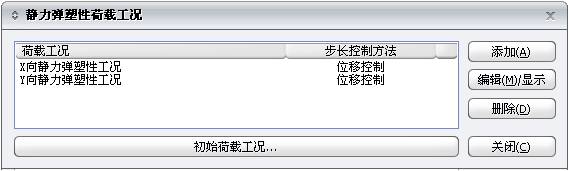
可添加、编辑、查看、删除静力弹塑性荷载工况。点击  按键可定义和查看初始荷载工况。点击 按键可定义和查看初始荷载工况。点击  可定义加载模式、加载方向和分析控制条件等。内容与首选项内容基本相同,下面对首选项中没有提供的选项以及一些注意事项进行说明。 可定义加载模式、加载方向和分析控制条件等。内容与首选项内容基本相同,下面对首选项中没有提供的选项以及一些注意事项进行说明。
| |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
图1.3.1-1 静力弹塑性荷载工况 | |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
图1.3.1-2 定义/编辑静力弹塑性荷载工况 | |||||||||||||||||||||||||||
|
(1)控制参数 | |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
图1.3.1-3 步长控制函数 | |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
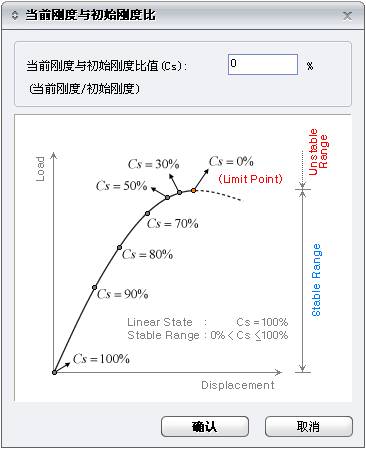
举例如下:当在前面对话框中的总步骤数输入50,最大位移控制为0.5m时,如果输入了(0.0,0.0)、(0.1,9.0)、(1.0,10.0)三个值,则表示步骤数分为两个阶段,第一个阶段有5个步骤(=0.1×50),位移增量从0增加到4.5m(=9.0×0.5m),第二个阶段有50个步骤(=1.0×50),位移增量从4.5m增加到5.0m(=10×0.5-9.0×0.5)。 (4)终止分析条件 | |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
图1.3.1-4 刚度比变化曲线 | |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||
|
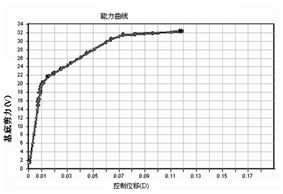
图1.3.1-5 未使用和使用刚度比比值作为终止条件时的性能曲线比较(左为未考虑) | |||||||||||||||||||||||||||
|
|