—
结构大师中提供下面三种步长控制方法:自动调整步长方法、等步长方法、自定义步长函数方法。
下面详细介绍各步长控制方法:
(1)自动调整步长
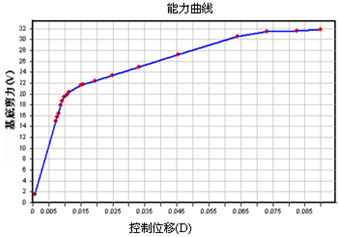
自动调整步长就是在非线性不是很明显的阶段加大步长间距,在非线性比较明显的阶段自动减小步长间距的方法。具体操作步骤如下:
第一阶段:计算弹性极限(n=1),加载水平荷载并计算各构件的内力和构件屈服内力的比值,从而获得达到屈服时的荷载增量。
第二阶段:根据收敛情况自动调整分析步长(1<n<nlast)。
(2)等步长
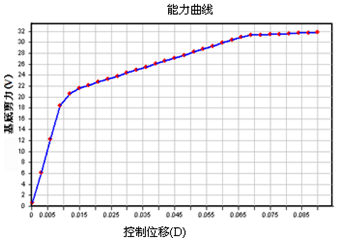
将控制荷载或控制位移按总步骤数等分作为分析步长。
(a) 等步长方法 (b) 自动调整步长方法
图3.2.2-1 不同步长控制方法的分析结果
(3)自定义步长函数方法
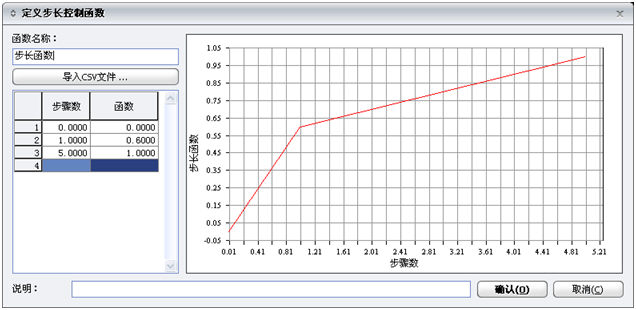
按照用户输入的步长函数计算各步长的荷载系数。定义步长函数的方法如下:
在Pushover荷载工况对话框中设定总步骤数。
选择步长控制函数并输入函数值(见图3.2.2-2)。其中步骤数与总步骤数无关,仅是用于定义函数的X轴的参数(X轴的最大值对应的是总步骤数,输入与总步骤数不同的数值时将按比例调整步骤数);函数值为荷载系数值。例如当总步骤数为10而按下面对话框中定义步长函数时,表示第2个步骤的荷载系数为0.6,第10个步骤的荷载系数为1.0。
图3.2.2-2 定义步长控制函数
1
动力弹塑性分析的一键式操作方法