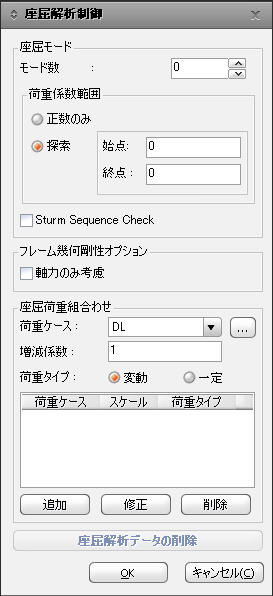
座屈モード 座屈モード
モード数:座屈モードの数を入力します。
荷重係数範囲
正数のみ:荷重作用方向に対する固有値結果のみ出力
Note1
一般的に座屈解析を行う場合は荷重作用方向と反対方向に対する座屈
モードを計算する。しかし、構造物の場合、使用者は荷重が作用する方向に
対する座屈形状係数及び係数を計算することが主な目的ですので作用する
方向に対する結果のみ出力する。
探索:求めようとする座屈荷重係数の範囲
始点:求めようとする座屈荷重係数の基準値
終点:求めようとする座屈荷重係数の限界値
Note2
基準値と限界値が一致する場合はその値に近い座屈荷重係数から
計算します。基準値と限界値が違う場合は基準値に近い座屈荷重
係数から計算します。
ただし、基準値と限界値の間に存在する値のみ計算します。
座屈荷重係数の抜け落ち判断
座屈荷重係数の抜け落ちを判断します。抜け落ちされた場合はメッセージ出力を
通じて確認できますが、追加計算はしません。
フレームの幾何剛性オプション
骨組部材の幾何剛性行列の構成に対する条件です。
軸力のみ考慮 : 軸力のみ考慮し、幾何剛性行列を構成します。
座屈荷重組合わせ
座屈解析用の荷重ケースを入力します。
複数の荷重ケースと増減係数を入力することができます。
荷重タイプ:変動する荷重と変動しない荷重に区別して指定します。
変動 :変動を考慮する荷重
一定 :変動を考慮しない荷重(常時荷重)
Note3
一定は構造物の自重のみ含みます。しかし、一般的に構造物をモデリングする時、
特に、床スラブの場合には自重と固定荷重を1つの荷重として入力するため固定荷重
を一定として入力しても構いません。
荷重ケースと増減係数を入力して
 をクリックします。 をクリックします。
荷重ケースを選択して増減係数を修正した後
 をクリックします。 をクリックします。
ダイアログ下部の荷重ケースのリストから、荷重ケースを選択して
 をクリックします。
をクリックします。
座屈解析はP-デルタ解析や固有値解析と同時に使用することができません。
座屈解析が可能な要素は、トラス要素、梁要素(テーパー断面梁要素を含む)
及び板要素に制限されます。
入力したデータをすべて削除する場合には
 をクリックします。
をクリックします。 |