|
The limit equilibrium method based on the
simplified Bishop formulation is a popular approach to the 2D slope stability
problem due to its simplicity and convenience. In commonly available software,
this approach is combined with the method of slices to determine the static
equilibrium. The method of slices, however, is based on several simplified
assumptions. For instance, it usually cannot take into account the effects
of ground water changes or of construction stages (stress path history
in plastic materials). The use of finite element analysis to determine
static equilibrium can overcome these limitations.
In GTS, a new type of 2D analysis is therefore
made available: Slope Stability based on Stress Analysis Method (SAM).
In this approach, the limit equilibrium method is applied to a state of
stress in static equilibrium computed using non-linear finite element
analysis. After the user specified a family of slip surfaces to be checked,
the analysis determines the factor of safety and the critical slip surface.
This new analysis type is complementary to
the existing Slope Stability (SRM) analysis based on the Strength Reduction
Method.
Slope Stability based on Stress Analysis Method
consists of 5 steps:
Step 1
: The user creates a model of the slope
(define the geometry of the model, soil property,
boundary and load)
Step 2
: The user defines a suitable family of slip surfaces
Step 3
: The user selects the analysis type Slope Stability (SAM) and runs
the FEM analysis
Step 4
: GTS smoothes the resulting stress field
Step 5
: GTS calculates the safety factor for each slip surface and identifies
the critical case.
[Step
1] Modeling of the Slope
Slope Stability (SAM) is restricted to 2D
analysis. Nevertheless, all element types, all material models, all loads
and all boundary conditions available in 2D non-linear analysis can be
used in Slope Stability (SAM).
The user should specify ground densities in
the material dialog and apply the gravity load.
[Step
2] Define families of slip surfaces
The user needs to specify the general shape
and the positioning of a family of slip surfaces that will be checked
for stability. In midas GTS, these can be specified using the menu Model
> Boundary > Slip Surface (Circular) or 'Model
> Boundary > Slip Surface (Polygonal).'
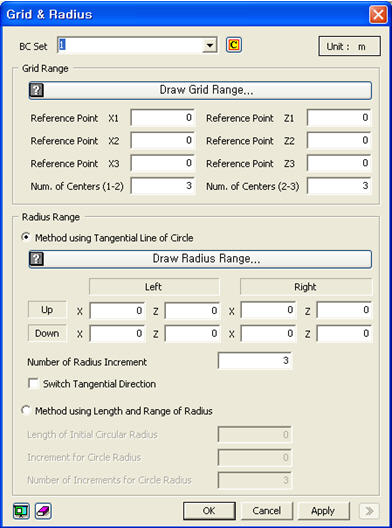
Figure
1: Dialog Box for a Circular Surface
The circular surface
function defines a family of slip surfaces in terms of centers and radii.
First, the family of centers can be specified using the Grid Range input,
see figure 1.
The Grid Range input
specifies a non-orthogonal grid of center points, as shown in figure 2.
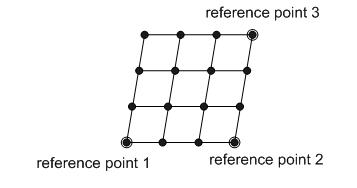
Figure
2: Reference Points of Grid Range
In
the input dialog, x1 and z1 correspond to the coordinates of Reference
Point 1. Similarly, x2, z2 and x3, z3 refer to the coordinates of Reference
Point 2 and Reference Point 3, respectively. These points can be created
by mouse-clicking or by entering the coordinates manually.
Num. of Centers (1-2)
defines the number of divisions between Reference Points 1 and 2. Num.
of Centers (2-3) defines the number of divisions between Reference Points
2 and 3.
An example with Num.
of Centers (1-2) = 5 and with Num. of Centers (2-3) = 3 is shown in Figure
3.
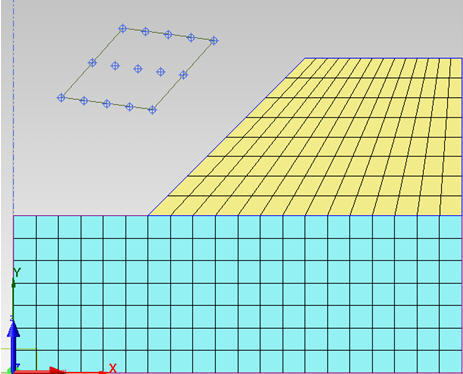
Figure 3: Example of Grid Range Input
Two methods are available
for defining the radii. One is the Method using the Tangential Line of
a Circle, and the other one is the Method using the Length and Range of
the Radius.
Method
using the Tangential Line of a Circle
This method
allows the definition of two extreme tangent lines by inputting the coordinates
of four points (mouse clicking or manual input), as shown in figure 4.
The number of radius increments defines the number of straight lines
that will be additionally created by dividing the distance between the
upper straight line and the lower straight line. Figure 4 shows the case
where the number of radius increments is 4.
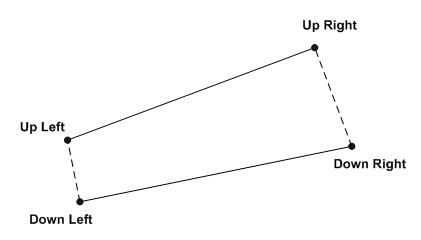
Figure 4: Input Point for the Method using
Tangential Line
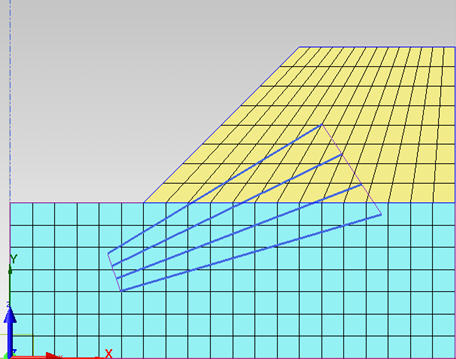
Figure 5: Input Examples for the Method using
the Tangential Line
The
length of each radius can be calculated as the shortest distance between
the considered center point (from the grid range) and the considered tangent
line. For instance, if the total number of center points is 12, and the
number of tangent lines is 4, the total number of trial Slip Surfaces
is 48 (12 x 4).
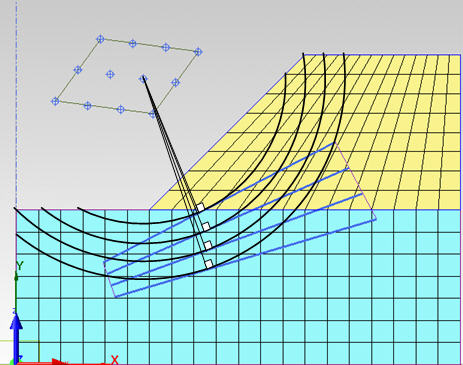
Figure 6: Trial Slip Surfaces using the Tangential
Line of a Circle
Method using
the Length and Range of the Radius
The method
using the radius requires three input items: Length of Initial Radius,
Length of Increments, and Number of Increments. A warning message will
appear if one of the defined circles does not intersect with the model.
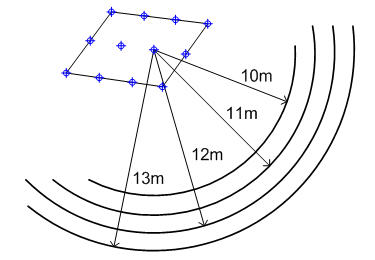
Figure 7: Example of Method using the Radius
Polygonal
Surface
The
Polygonal Surface function is an alternative option to define the shape
of slip surfaces. Each polygonal line can be defined either using mouse
clicks or manually entering coordinates.
In the case
where coordinates are defined through mouse clicking, the selected points
can be checked in a table, as shown in figure 10.
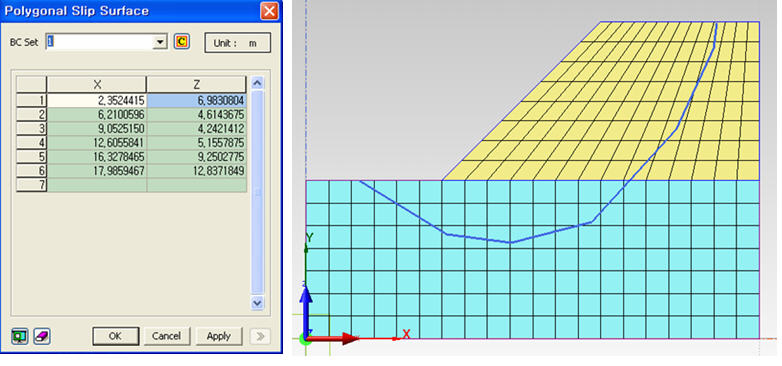
Figure 10: Input Examples of Polygonal Surfaces
[Step 3] Perform slope stability analysis
(SAM)
In order to compute
the static equilibrium of stress field, an analysis case of type Slope
Stability (SAM) must be created and run. Note that the ground water level
can be defined as an equation or as a multi-linear diagram in the Analysis
Control dialog box.
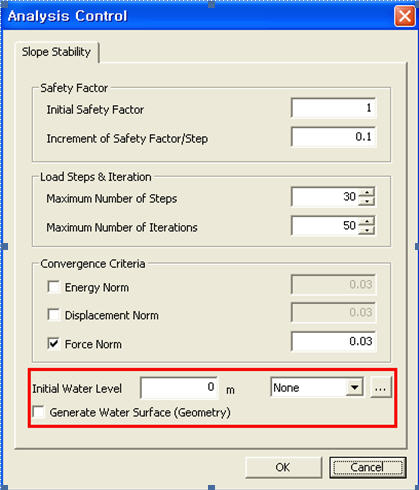
Figure 11: Input Dialog for Ground Water Level
during Slope Stability Analysis
[Step 4] Smoothing of
the resulting stress field
The integration of
stresses along trial slip surfaces requires Co continuity of the stress
field. Since the resultant stress field from finite element methods could
be discontinuous at element boundary, it is necessary to smooth the FEM
stress results to obtain a continuous stress field over the whole model
before integration. The stress smoothing method proposed by Hinton and
Campbell (1974) is adopted. In this method, the
shape functions, N, which is generally used for the interpolation of displacements
from nodal values, is adopted as piecewise interpolation functions to
obtain the continuous stress field. The degrees of freedom of this interpolation
are unknown stress values at the nodes of the finite element mesh. Unknown
nodal stress values are determined by minimizing of the distance between
the discontinuous FEM stress field and the continuous interpolated stress
field.
[Step
5] Calculate the Factor of Safety
The factor of safety used in the Stress Analysis Method is
computed by integration over the slip surface. Numerical integration of the smoothed stress field along the
Slip Surface. The stress integration along the slip surface in the global
coordinate system is calculated. Determination of the factor of safety of the slope The factor of safety is computed for all trial slip surfaces
specified by the user. The slip surface with the lowest factor of safety
is identified as the critical slip surface. The lowest value is identified
as the factor of safety of the slope. | 2.png)
2.png)
 button and create or modify a function
.
button and create or modify a function
.